
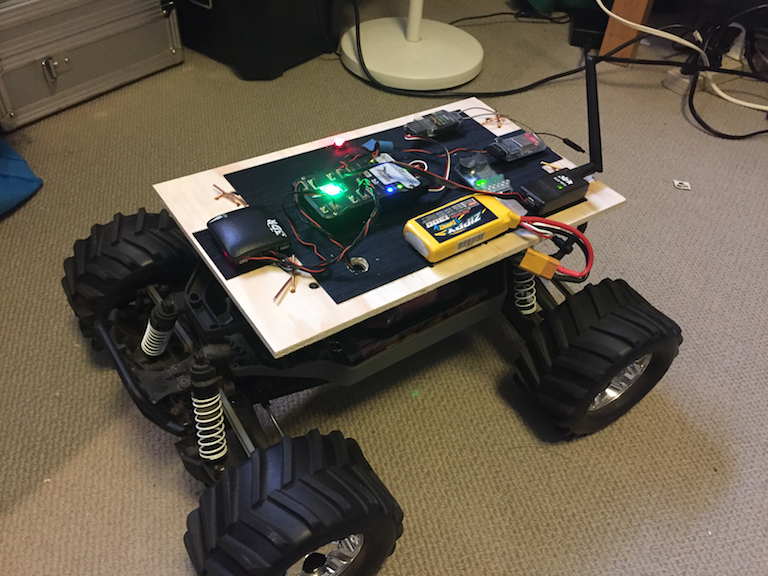
Just happened to be chatting with a guy down the park about the small RC quadcopter i was flying and we got onto the subject of RC Trucks. Just so happens he had a Traaxis Stampede 4X4 gathering dust… Well it gathers dust no more. (just kicks it up in the air from those tyres!)
I’ve installed a temporary top plate* to mount the electronics to make this beast come alive. It fitted out with
- Pixhawk Flight Controller with ArduRover 3.1 Beta release
- Separate GPS & Magnetometer
- SiK 915Mhz Radio
- ESP8266-07 WiFi module with ESP8266 FW
- FrSky RC D4R-II
- Control is via FrSky Taranis 9D
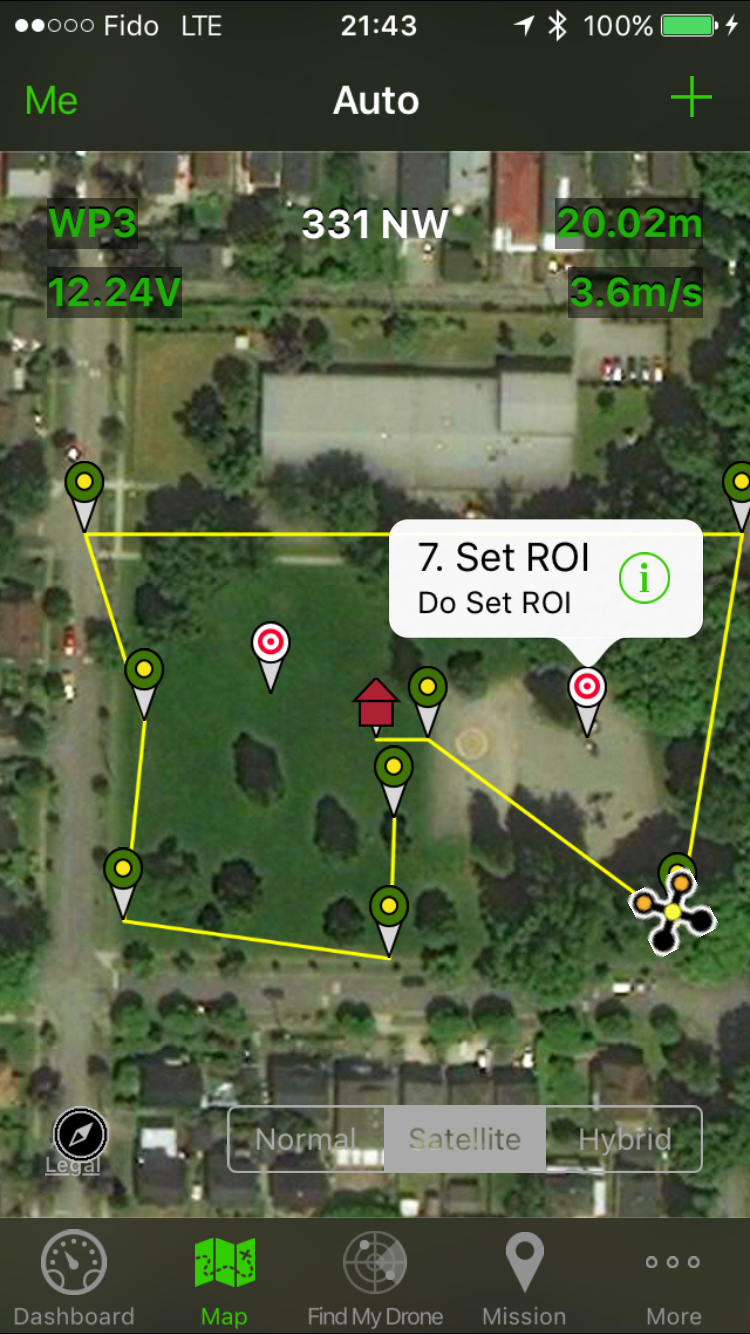
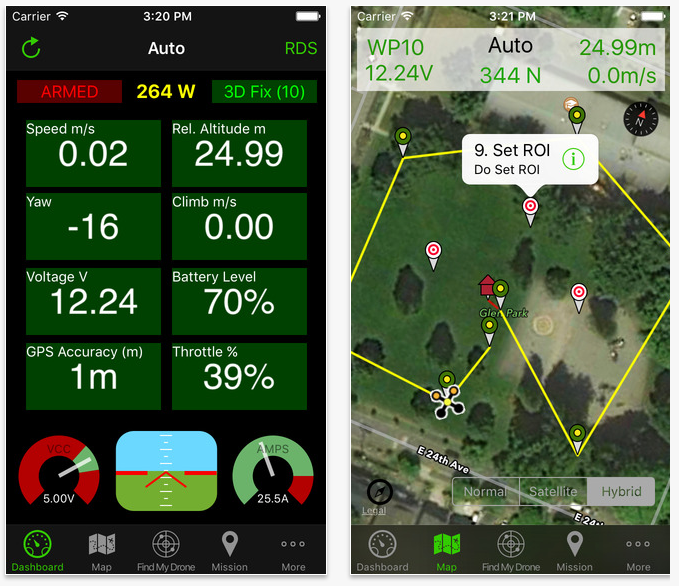
- And of course MAV Pilot
I just finished the build tonight, but the weather changed from glorious sun to rain. I think now that I have the electronics sorted, i’ll need to put it all in a sealed Tupperware box 😉
More info and discussions at ArduPilot Forums The Home of ArduPilot!


 If you have a new Iris Quadcopter from 3DR with a FlySky RC Transmitter, you may want to add CH8 option to trigger other features. Below is a walk-through on how to add this to the standard Iris setup.
If you have a new Iris Quadcopter from 3DR with a FlySky RC Transmitter, you may want to add CH8 option to trigger other features. Below is a walk-through on how to add this to the standard Iris setup.