
Forum Replies Created
-
AuthorPosts
-
Bill B
KeymasterPlease raise further questions in the Tech Support forum. thx http://www.communistech.com/forums/forum/tech-support/
KeymasterYou can set WPNAV_SPEED in the parameters view. The speed between WP in cm/s ie 500 is 5m/s
I’m not sure about the glitch between WPs, i need to look into how that can be adjusted by the parameters. It’s part of the vehicle config, and not really a MAVPilot issue.
I will be adding Config Screens so items like WPNAV_SPEED etc are easily set using a slider for example.
KeymasterThen list of how the commands behave on copter are here http://copter.ardupilot.com/wiki/mission-command-list/
KeymasterHi,
Sorry there is no “Owners Manual” yet. I was thinking of doing a video on Mission Planning. I’ll do a picture based walkthrough this weekend. In the meantime or you may want to try Guided Mode (scroll to bottom)
The steps below are for a simple mission flown after a manual takeoff.
1. Start in Mission View, and select refresh so you can see a valid Home entry.
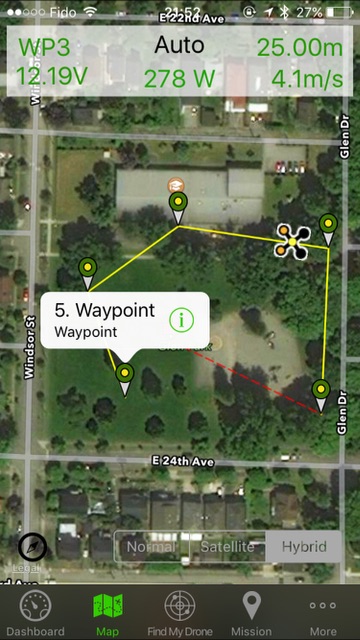
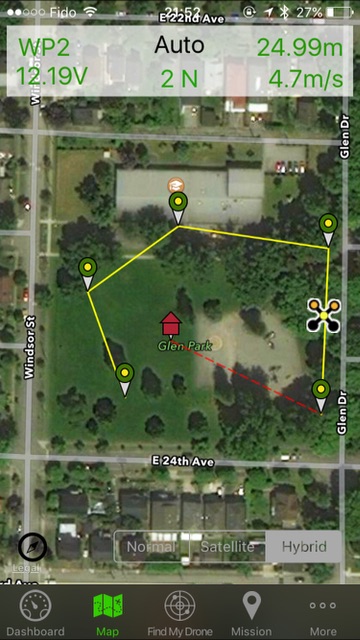
2. Go to Map View. You can add a waypoint by long-pressing on the screen, select the ‘green with yellow’ circle. Place a waypoint near where you plane to take off i.e.. drone home location
see http://www.communistech.com/question/how-do-i-create-a-new-waypoint/
3. Repeat with a number of mission items.
4. To ‘upload’ to the vehicle, go to Mission View and select ‘Upload’ from the ‘options icon’ (top left)
– The share icon is RED, if the mission has not been uploaded
– The message ‘saved’ is shown, on successful upload. options icon will be in green
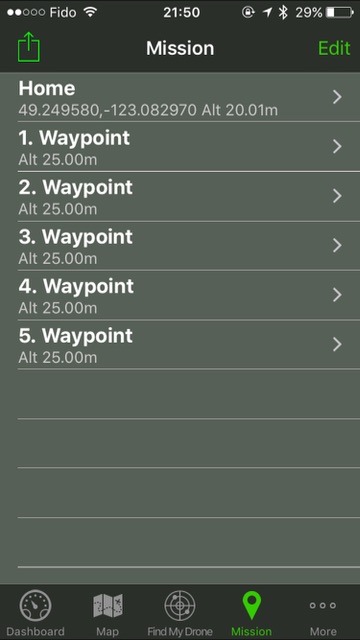
5. You can verify the Waypoint attribute for each mission item by electing the ‘I’ from the callout on the map, or in the mission view. The default height for the Waypoint is 25m and is set in the Settings view. (you may want to lower that for your test flight)
5. To run your mission, go to the dashboard. Now you will need to manually take-off, for example, to 10m and then go to loiter or pos-hold mode.
6. Tap the dashboard screen to reveal the control panel, and press Auto (or select Auto from your Drone Transmitter)
Your drone should now head to Waypoint 1 and then follow on to WP2 etc and will stop at the end and loiter. You can monitor on the Map View. For your first auto flight, keep your control handy to switch to Loiter/Alt Hold if something does’t seem to be going as planned. (Fly or Fly:Manual for Solo Control)

Hope that helps 🙂 Please ask more questions if it’s unclear and I will do my best to explain it.
GUIDED MODE
You may want to try Guided Mode first. This is done using the ‘+’ icon after a long press. In this case th drone will fly to the point under where finger was, at default 10m. (in a the next release it will drop a marker, it’s missing from the 1.1 release)-
This reply was modified 8 years, 5 months ago by
Bill B. Reason: Added Images
-
This reply was modified 8 years, 5 months ago by
-
This reply was modified 8 years, 5 months ago by
-
This reply was modified 8 years, 5 months ago by
-
This reply was modified 8 years, 5 months ago by
KeymasterI do have plans to make iPad version of the views. I focused on iPhone first since the Audio announcements are the killer feature when flying in the field.
KeymasterYou should verify you have telemetry data coming into the RPi from your serial Oort. You can use ‘screen’ to do than. I.e. screen /dev/
57600 or whatever baud rate you have set. KeymasterMAVPilot and FMD use IP connections and don’t have a Baud rate parameter. The baud setting between the Radio and the Pi won’t effect the Apps
KeymasterI have one on order so I can do a write up on connecting it up to a 3DR Radio to make a long range bridge. Hopefully it comes soon.
If you need help in figuring it out or have questions I can help, just post here and I will do my best.
-
This reply was modified 8 years, 5 months ago by
-
This reply was modified 8 years, 5 months ago by
-
AuthorPosts